





Biodiversitätsschonende Grünflächenpflege
So können autonome Mähsysteme unterstützen
Autonome Systeme können Maßnahmen, die die Biodiversität fördern sollen, unterstützen und vereinfachen. Sie dienen zudem der Arbeitssicherheit, vor allem an steilen Hängen. Die LWG Veitshöchheim hat dazu in Versuchen nützliche Erkenntnisse gewonnen. Der Fokus liegt auf Universalgeräteträgern, mit denen Mähen und Abräumen möglich ist.
von Gerhard Hetz erschienen am 20.03.2025Mit mehr als 15 Herstellern und über 50 Modellen besteht eine vielfältige Produktpalette. Der Großteil der Maschinen ist mit einem Raupenlaufwerk ausgestattet. Es gibt aber auch einige Modelle, die als ferngesteuerte Einachser konzipiert sind. Hier sorgt dann in der Regel ein System zur Achsverschiebung in Längsrichtung für die notwendige Kopflastigkeit beim Einsatz am Hang.
Autonome Mähsysteme in der Extensivpflege - Status quo
Einige Hersteller befassen sich mit (teil-)autonomen Systemen zur Steuerung von Universalgeräteträgern. Alle Systeme verfügen zur Lokalisierung über einen GNSS-Empfänger mit RTK-Genauigkeit. Mithilfe der Positionsdaten können dann eingelernte Spurrouten abgespeichert und vom System generierte Spurrouten abgefahren werden. Die Steuerung erfolgt über eine App am mobilen Endgerät (Smartphone oder Tablet). Über eine Kommunikationsschnittstelle (wie CAN-Bus) werden dann die Informationen für Lenkbewegungen an die Maschine weitergegeben.
Die Firma Rapid aus der Schweiz befasst sich seit einigen Jahren im Zuge des Cosmos-Projekts mit einem autonomen Einachser. 2024 wurde ein solcher mit Anbaugeräten für die Grünfutterernte vorgestellt. Auch die Firma Pflanzelt arbeitet an der Entwicklung eines autonomen Systems in Zusammenarbeit mit der Firma Digital Workbench. Die Firma Vogt, welche die Mähraupen des italienischen Herstellers MDB vertreibt, hat in Zusammenarbeit mit der Firma Reichhardt das System SIS Remote zur teilautonomen Steuerung einer Mähraupe entwickelt. Es können Spuren (zum Beispiel A-B-Linien) angelegt und in Maschinenarbeitsbreite parallel versetzt spurgetreu abgefahren werden. Die aufgezeichneten Spuren können abgespeichert werden, um sie beim nächsten Arbeitsgang wieder aufzurufen. Das System hat eine Silbermedaille auf der Agritechnica 2022 gewonnen.
Köppl hat in Zusammenarbeit mit der Firma Robot Makers eine autonome Steuerung für die Modelle Crawler und Gekko entwickelt. Das Autonomie-Kit ist mit einer Kamera für Fernüberwachung und Teleoperation und einem 3D-Laserscanner erweiterbar. Mithilfe der Anwendung MowPilot können über den Teach & Repeat-Ansatz Flächen nach dem einmaligen Einlernen autonom abgefahren werden. Zudem ist es möglich, nach manueller Feldumfahrung die Routen im Inneren zu berechnen und anschließend autonom inklusive der Wendenmanöver abzufahren. Ab 2024 konnte für die Versuche der LWG (Bayerische Landesanstalt für Weinbau und Gartenbau) ein eigener Crawler mit Anbaugeräten genutzt werden.
Die beschriebenen Systeme bedürfen aus Sicherheitsgründen der Überwachung und lassen sich noch nicht als vollautonome Systeme einordnen. Folgende Grafik gibt einen Überblick über verschiedene Autonomielevel am Beispiel von Universalgeräteträgern für die Landschaftspflege.
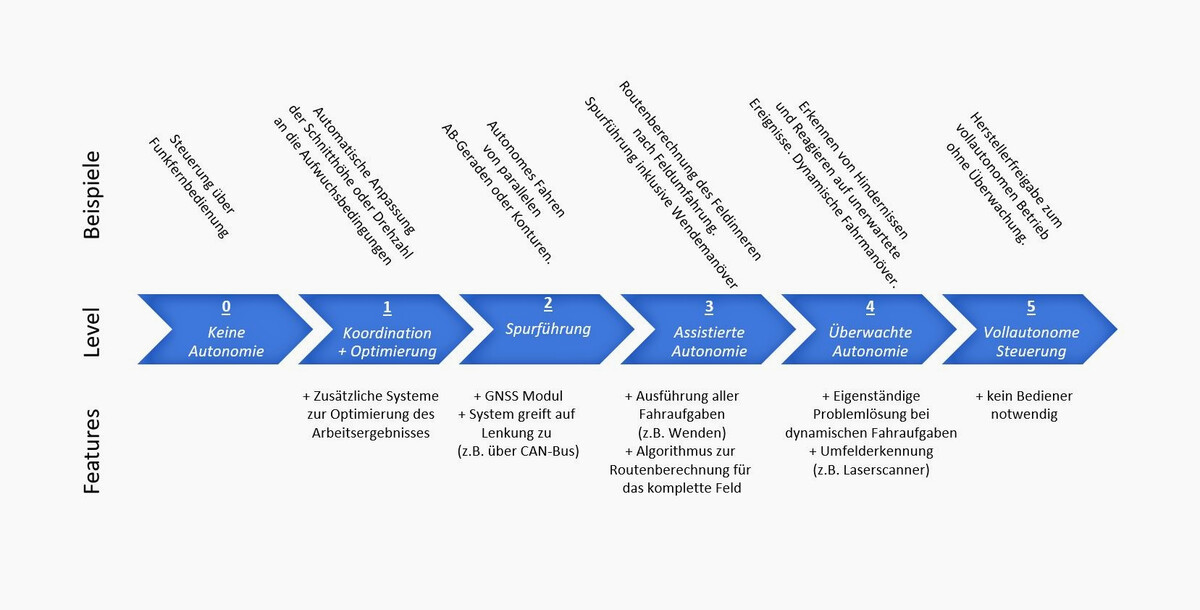
Autonomielevel 0-5 für Universalgeräteträger in der Landschaftspflege. (Erstellt auf Grundlage der Autonomielevel in https://www.ravenind.com/path-to-autonomy) © Gerhard Hetz
Was leisten autonome Systeme für mehr Biodiversität?
Einige dieser Maßnahmen lassen sich mithilfe autonomer Systeme unterstützen bzw. vereinfachen:
Effiziente Mäharbeit durch GNSS-Steuerung
Mithilfe einer satellitengestützten Lenkung wird die Mäharbeit effektiver. Es werden Überlappungen bei der Anschlussfahrt minimiert, sodass die volle Arbeitsbreite genutzt und unnötige Fahrten vermieden werden können. So wird auch weniger in die Wiesenfauna eingegriffen. Die beiden Bilder zeigen beispielhaft die Routenführung an einer Steilhangwiese (manuell vs. autonom), wobei die autonome Variante das effizientere Mähergebnis erzielt.
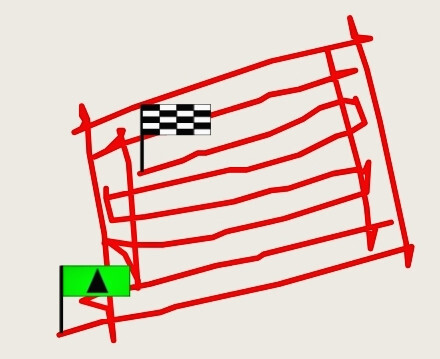
Spurlinien am Beispiel von Köppl SelfDrive/MowPilot (aus der App RM Connect der Robot Makers GmbH). Das Feld wird zunächst doppelt umfahren, danach erfolgt die Mahd des Feldinneren manuell (oben) bzw. autonom (unten). © Gerhard Hetz
© Gerhard Hetz
Exakte Anlage von Altgrasstreifen
Durch die Grünpflege können Tiere nicht nur direkt geschädigt werden, sondern ihnen wird auch, zumindest zeitweise, ein Stück ihres Lebensraumes genommen. Altgrasstreifen sind dann gut geeignete Ersatzhabitate in der nahen Umgebung. Mithilfe von GNSS-Steuerungen und autonomen Mähsystemen lassen sich Altgrasstreifen sehr effektiv anlegen und managen. So kann die Breite der Altgrasstreifen der Maschinenarbeitsbreite entsprechen. Die Spurlinien der Altgrasstreifen können dann im folgenden Jahr gezielt gemäht werden, um Verbuschung zu vermeiden. Altgrasstreifen lassen sich so auch dokumentieren und verwalten.

Altgrasstreifen mit vier Arbeitsbreiten eines Doppelmessermähwerkes © Gerhard Hetz
Tierschonende Befahrmuster mithilfe von Autonomie einfach umsetzten
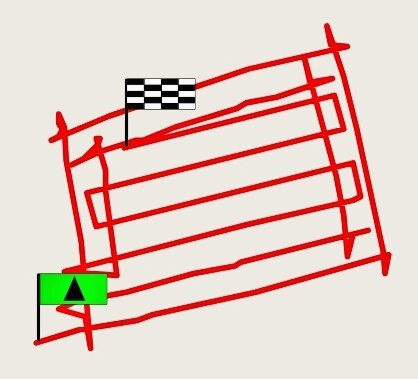
Tierschonende Befahrmuster sollen den Tieren eine möglichst einfache Flucht vor dem Mähgerät ermöglichen. Das Mähen einer Fläche von außen nach innen ist zu vermeiden. Besser geeignet ist das Mähen von innen nach außen (siehe Bild unten) oder von einer Seite zur anderen. Dieses Verfahren kann zu höheren Einsatzzeiten führen, da zum Beispiel beim Mähen von innen nach außen die erste Bahn nicht exakt angelegt wird. Hier können autonome Mähsysteme oder GNSS-Steuerungen sehr gut unterstützen.
Tierschonendes Befahrmuster mit Spurlinien. Die Mähraupe fährt von innen nach außen, um Tieren die Flucht zu erleichtern. © Gerhard Hetz
Erhöhter Arbeitsaufwand durch Mähen und Abräumen Lösung durch Autonomie?
Das Abräumen von Mähgut bietet vor allem aus Sicht der floristischen Entwicklung einer Wiese Vorteile, was sich durch die Entwicklung attraktiver Habitate auch auf die Fauna auswirken kann. Durch das Abräumen des Mähguts werden Nährstoffe entzogen und offene Flächen für Lichtkeimer geschaffen.
1Das Abräumen von Mähgut erfordert gegenüber dem Mulchen zusätzliche Arbeitsschritte. Vollautonome Mähsysteme könnten dem erhöhten Arbeitsaufwand begegnen. Hierbei ist zu beachten, dass das Abräumen im Gegensatz zum Mähen als Fahraufgabe im autonomen Modus deutlich anspruchsvoller ist und daher noch viel Entwicklungsaufwand insbesondere an Überwachungssensorik besteht. Ein Video zu den verschiedenen Maßnahmen finden Sie hier.
Faunistische Untersuchungen an der LWG
Es wurden über die Projektlaufzeit (20222024) faunistische Untersuchungen durchgeführt, um die Wirkung verschiedener Biodiversitätsmaßnahmen zu testen. Dabei wurden unmittelbar nach dem Mulchen oder Mähen Bodenphotoeklektoren (Überspannung vom 1 m2 ; siehe Bilder) aufgestellt, wo sich in einer Falle die überlebenden Insekten und Spinnen sammeln. Diese Proben wurden nach zwei Tagen entnommen und in Alkohol konserviert. Im Labor wurden sie dann gewogen und nach Ordnungsniveau ausgezählt.
2Aufgrund der heterogenen Verteilung der Kleinstfauna in der Wiese und der damit einhergehenden hohen Varianz sind große Stichprobenmengen notwendig. Deshalb wurden auch die meisten Versuche mit Mulchgeräten durchgeführt, da hier aufgrund des größeren Eingriffs als zum Beispiel beim Messerbalken am besten signifikante Unterschiede sichtbar werden können. Aus den Versuchen geht somit auch ein großer Datensatz zur Bewertung des Mulchens im Allgemeinen hervor. Insgesamt wurden 492 Proben genommen, wobei hiervon je 134 Kontroll- und Mulchvarianten in folgender Grafik einfließen.
![Durchschnittliche Reduktionsraten durch das Mulchen bei verschiedenen Tiergruppen (klein: < 5 mm Rumpflänge und groß: > 5 mm Rumpflänge) sowie bei der Insekten- und Spinnenmasse (Abtropfgewicht). [Berechnet aus insgesamt 134 Kontroll- bzw. Mulchvarianten]](/vorlagen/webapp/cache/cms/118329_haytcnrzheza-715x540.png)
Durchschnittliche Reduktionsraten durch das Mulchen bei verschiedenen Tiergruppen (klein: < 5 mm Rumpflänge und groß: > 5 mm Rumpflänge) sowie bei der Insekten- und Spinnenmasse (Abtropfgewicht). [Berechnet aus insgesamt 134 Kontroll- bzw. Mulchvarianten] © Gerhard Hetz
Insbesondere Heuschrecken weisen mit zirka 72 % hohe Schädigungsraten auf. Hautflügler (ohne Ameisen), Spinnen, Wanzen, Zikaden und Zweiflügler wurden in große (> 5 mm Rumpflänge) und kleine (< 5 mm Rumpflänge) unterteilt. Es lässt sich schön sehen, dass größere Tiere deutlich häufiger geschädigt werden als kleinere. Die Insekten- und Spinnenmasse (Abtropfgewicht) sank durch das Mulchen um zirka 38 % und stellt eine Mischprobe aus allen Tieren dar.
Im Folgenden werden Ergebnisse der faunistischen Versuche Doppelte Überfahrt und Aktive und inaktive Zeit vorgestellt. Die Anzahl an Individuen wird jeweils in Boxplots dargestellt. Die Mittelwerte sind mit * angegeben.
Faunistischer Versuch Doppelte Überfahrt
Mit dem Versuch Doppelte Überfahrt soll untersucht werden, ob das Mulchen mit Überlappungen bei der Anschlussfahrt einen Einfluss auf die Überlebensrate der Kleinstfauna hat. Schließlich kann gerade mit ferngesteuerten Mähgeräteträgern an Böschungen häufig die Anschlussfahrt nicht genau gefahren werden und Teilbereiche werden doppelt gemulcht. Für den Versuch wurden folgende Varianten gewählt:
- Kontrolle
- Einfach (einmal Mulchen)
- Doppelt (1. Mulchen ? Wenden ? 2. Mulchen)
Die Kontrolle soll aufzeigen, wie hoch das Insektenpotenzial auf der Fläche ist. Mithilfe der Variante Einfache Überfahrt soll der Standardfall beim Mulchen aufgezeigt werden. Die Variante Doppelte Überfahrt soll schließlich aufzeigen, wie sich das Überlappen des Mulchgeräts beim Anschlussfahren auswirkt.
Die Reduktion der Anzahl an Heuschrecken beträgt im Durchschnitt 83 % bei der Variante Einfach und 87 % bei der Variante Doppelt. Bei der Anzahl großer Zikaden lag die Reduktion bei Variante Einfach bei 66 % und bei der Variante Doppelt bei 93 %.
Eine tendenziell höhere Reduktionsrate konnte wie bei den Heuschrecken bei mehreren Tiergruppen gesehen werden. Bei großen Zikaden konnte auch ein signifikanter Unterschied zwischen den Varianten Einfach und Doppelt nachgewiesen werden. Somit lässt sich die vorsichtige Annahme treffen, dass genaues Arbeiten nicht nur den Maschineneinsatz reduzieren kann, sondern sich auch positiv auf die Überlebensrate von Kleinstfauna auswirkt. Hier könnten GNSS-Systeme mit einer sehr genauen Anschlussfahrt eine gute Hilfe sein.
Faunistischer Versuch Aktive Zeit und Inaktive Zeit
Bezüglich des besten Tageszeitpunktes für die Grünpflege gibt es unterschiedliche Standpunkte. Für eine höhere Überlebensrate der Kleinstfauna zur inaktiven Zeit (nachts oder bei Regen) spricht, dass einige Insekten dann gar nicht in der Wiese sind und somit auch nicht geschädigt werden können. Andererseits sind Tiere zur aktiven Zeit (tagsüber oder bei Sonnenschein) mobiler und können somit gegebenenfalls besser fliehen. Um diesen Sachverhalt zu untersuchen, wurden faunistische Untersuchungen einmal zur inaktiven Zeit um 6 Uhr und zur aktiven Zeit um 13 Uhr durchgeführt. Daraus ergeben sich folgende Varianten:
- Kontrolle inaktive Zeit (6 Uhr)
- Mulchen inaktive Zeit (6 Uhr)
- Kontrolle aktive Zeit (13 Uhr)
- Mulchen aktive Zeit (13 Uhr).
Die Reduktionsraten lagen bei Heuschrecken zur inaktiven Zeit bei 80 % und zur aktiven Zeit bei 77 %. Die Insekten und Spinnenmasse reduzierte sich durch das Mulchen zur inaktiven Zeit um 46 % und zur aktiven Zeit um 49 %. Insgesamt konnten keine Unterschiede zwischen den beiden Mulchvarianten nachgewiesen werden. Auch das Insektenpotenzial zur aktiven und inaktiven Zeit (beide Kontrollvarianten) unterscheidet sich im Wesentlichen nicht. Lediglich bei einer Tiergruppe gab es einen signifikanten Unterschied. Insbesondere auch bei der Gruppe der großen Hautflügler, zu denen ja auch Bienen zählen, konnten keine Unterschiede entdeckt werden.
Zum aktuellen Zeitpunkt sollte demnach die Wahl des Tageszeitpunktes bei der Grünpflege aus Sicht der Schonung von Insekten und Spinnen nicht in den Vordergrund gestellt werden. Weitere Untersuchungen gerade auch zur Grünpflege während der Nacht oder in Bezug auf andere Tiere wie Igel sollten jedoch bei einem zunehmenden Einsatz autonomer Systeme in Betracht gezogen werden.
Noch Entwicklungsbedarf
Gerade vollautonome Systeme (ohne die Notwendigkeit einer überwachenden Person) könnten einen wichtigen Beitrag für biodiversitätsfördernde Grünpflegemodelle leisten. Jedoch sind mit Blick auf die Entwicklung vollautonomer Maschinen sowohl die Aspekte Risikominderung von Kollisionen (zum Beispiel Erkennung von Personen und Hindernissen) als auch die Sicherstellung des Arbeitsergebnisses der Anbaugeräte (wie Erkennung von Verstopfungen oder falschen Einstellungen) von besonderer Bedeutung. Schließlich kümmert sich bei teilautonomen Systemen die überwachende Person um diese Aspekte, und bei Gefahr für Leib und Leben ist besondere Vorsicht geboten. Hier müssen also noch zahlreiche Erfahrungen im Prototypenstatus gesammelt werden.
Außerdem besteht noch Forschungsbedarf hinsichtlich der Sensor- und Überwachungstechnik, gerade wenn schneller gefahren wird als bei der Beikrautbekämpfung (Hackrobotik), die aufgrund der niedrigen Fahrgeschwindigkeiten teilweise schon einen hohen Autonomiegrad erreicht hat. Es zeigt sich jedoch, dass auch teilautonome Lösungen bereits einen wichtigen Beitrag leisten können.
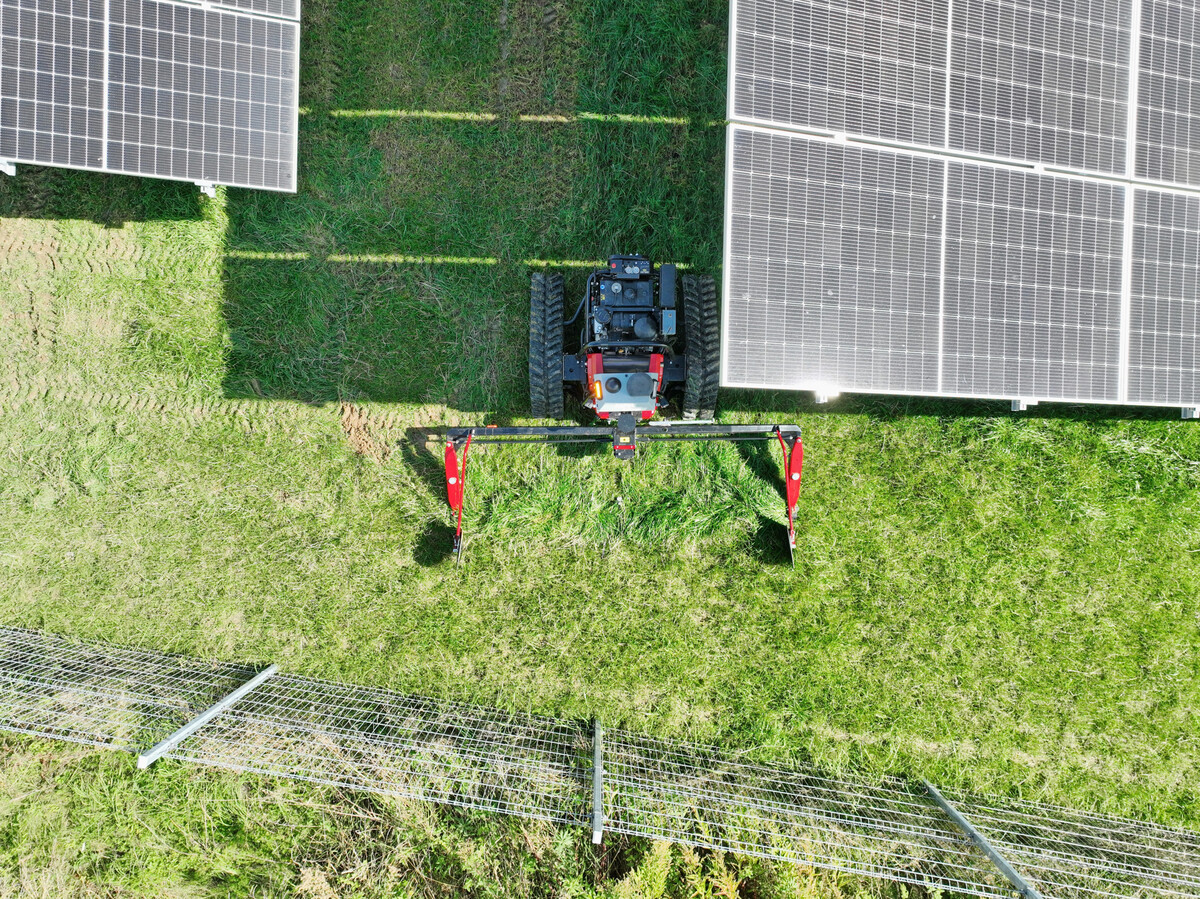
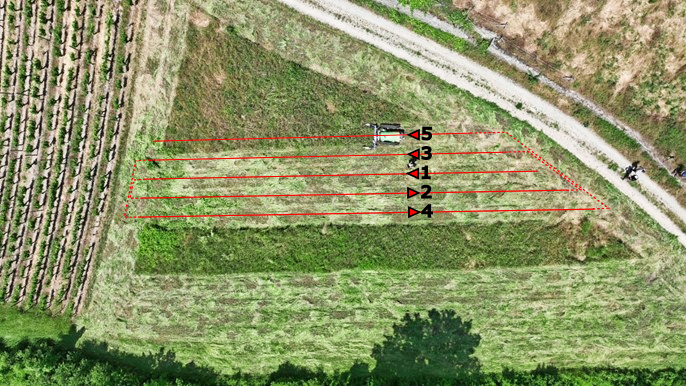
Köppl Crawler mit Autonomiekit (inklusive Laserscanner) und Doppelmesserbalken bei der autonomen Navigation zwischen den Modulreihen © Gerhard Hetz
Ein interessanter Anwendungsfall mit erfolgversprechenden Aussichten ist die vollautonome Grünpflege im Photovoltaikpark. Schließlich schützt hier die Einzäunung der Anlage vor unerwarteten Gefahren (hineinlaufende Personen, Wild). Da durch die Modulaufständerung die Signale für das GNSS abgeschattet sein können, muss zeitweise ein Ersatzsystem die Navigation übernehmen (zum Beispiel per Laserscanner).
In Zusammenarbeit mit der Robot Makers GmbH erprobte die LWG im Projekt Autonome Mähsysteme für effektive biodiversitätsfördernde Pflege die autonome Grünpflege im Photovoltaikpark. Das Trägerfahrzeug sowie die Anbaugeräte wurden von der Firma Köppl zur Verfügung gestellt. Die autonome Navigation mit Doppelmesserbalken zwischen sowie unter den Modulreihen funktionierte mithilfe der beiden Partner erfolgreich. Dabei wird der Geräteträger mithilfe eines Laserscanners durch die Modulaufständerung gesteuert. GH

© LWG
Autor:in
Gerhard Hetz
Gerhard Hetz studierte Agrarwissenschaften mit dem Schwerpunkt Agrartechnik an der Universität Hohenheim. Von Mai 2022 bis Januar 2025 bearbeitete er an der LWG im Institut für Stadtgrün und Landschaftsbau das Projekt Autonome Mähsysteme für effektive biodiversitätsschonende Pflege (gefördert durch das StMELF). Zudem unterstützt er im Projekt Verwertungsalternativen für Mähgut aus Straßenbegleitgrün.
Bezugsquellen
Köpplwww.koeppl.com
Rapidwww.rapid.ch/de
Vogt/MDBwww.vogtgmbh.com
Robotmakerswww.robotmakers.de
0 Kommentare
Zu diesem Artikel liegen noch keine Kommentare vor.
Artikel kommentierenSchreiben Sie den ersten Kommentar.